Next-Generation Cooperative Vehicle Safety System
We aim to develop M2M-based spatiotemporal sensing technologies where the states of moving objects outside the car and the states of people inside the car will be estimated probabilistically and concurrently. This involves three key M2M challenges: (1) highly uncertain data from heterogeneous sensors, (2) dynamic connectivity, and (3) actions under uncertain estimates and dynamic connectivity.
PI: Prof. Hsin-Mu (Michael) Tsai Co-PI: Prof. Kate Ching-Ju Lin
Intel Champions: Xingang Guo & Rick Roberts
Scooters are one of the most important transportation means in Taiwan, Thailand, as well as several European countries. Statistics show that in Taiwan approximately 70% of the total number of mobile vehicles (which includes trucks, passenger cars, scooters, and buses) are scooters. They are popular in the urban areas since it is easy to navigate through heavy traffic with them due to their smaller size and also among the citizens in the suburban areas due to their low costs. Unlike regular passenger vehicles or buses (for which the research community have proposed Vehicular Ad hoc Networks, or VANETs), there is very little research which focuses on communications or networking between scooters on the road.
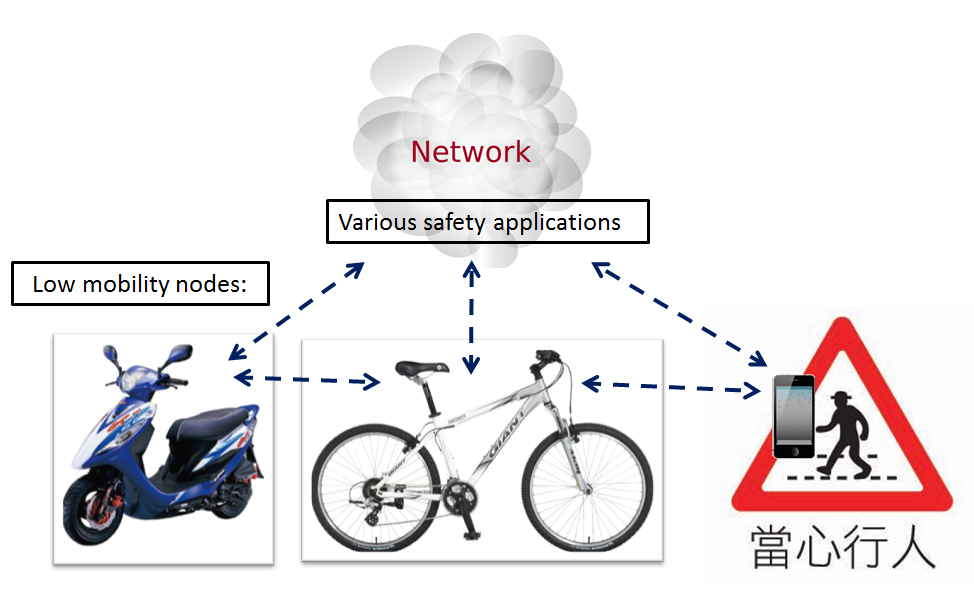
In this project, the main objective is to develop a new network infrastructure in order to provide network connectivity to scooters, as well as other node types with low mobility, such as pedestrians and bikes.With the capabilities to communicate directly with other vehicles on the road orwith the cloud (via pre-deployed relay stations, e.g., a cellular base station or a road-side unit), they can also be provided with a safer, smarter and more efficient transportation environment.
Due to the high node density and high network size nature of this network, as well as the fact that the system design has to be energy and cost efficient for scooters and other low-mobility nodes, we believe that it would be a challenging case of M2M networks worth to be studied; the guidelines derived from this research could provide insights on the design of a more generic and unifying M2M network.
Members


Publications
H. Lin, H. Tsai and M. Boban, "Scooter-to-X communications: Antenna placement, human body shadowing, and channel modeling", Ad Hoc Networks, vol. 37, 2016, pp. 87 - 100.



C. Huang et al., "LiBeamScanner: Accurate Indoor Positioning with Sweeping Light Beam", New York, NY, USA: Association for Computing Machinery, 2015.
S. Chen et al., "Making in-Front-of Cars Transparent: Sharing First-Person-Views via Dashcam", Computer Graphics Forum, vol. 33, no. 7, 2014, pp. 289-297.
C. Chan, J. Chen and H. Tsai, "MouseVLC: Visible Light Communications Using Mouse Sensors", in 2014 IEEE International Conference on Internet of Things (iThings), and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom), pp. 328-331.
C. Hsieh et al., "Predict Scooter's Stopping Event Using Smartphone as the Sensing Device", in Proceedings of the 2014 IEEE International Conference on Internet of Things(IThings), and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom), USA: IEEE Computer Society, pp. 17–23.
P. Ji et al., "Vehicular Visible Light Communications with LED Taillight and Rolling Shutter Camera", in 2014 IEEE 79th Vehicular Technology Conference (VTC Spring), pp. 1-6.
W. Viriyasitavat, S. Yu and H. Tsai, "Short paper: Channel model for visible light communications using off-the-shelf scooter taillight", in 2013 IEEE Vehicular Networking Conference, pp. 170-173.
C. Wang, H. Tsai, "Detecting urban traffic congestion with single vehicle", in 2013 International Conference on Connected Vehicles and Expo (ICCVE), pp. 233-240.
S. You et al., "Visible Light Communications for Scooter Safety", in Proceeding of the 11th Annual International Conference on Mobile Systems, Applications, and Services, New York, NY, USA: Association for Computing Machinery, 2013, pp. 509–510.
Y. Huang et al., "Stochastic delay guarantees in ZigBee cluster-tree networks", in 2012 IEEE International Conference on Communications (ICC), pp. 4926-4930.
 國立臺灣大學
國立臺灣大學
